机器人摇操教程
1. 机器人启动教程
开机 :
按下电源键,指示灯亮,nuc上电,然后顺时针旋转急停开关,急停松开,电机驱动器上电。
关机 :
按下急停开关,电机驱动器断电,然后按下电源键,指示灯熄灭。

▫️ 1.机器人双手竖直下垂,摆正各关节电机,使左右手臂从肩部到手臂末端形成一条直线。
▫️ 2.机器人按下电源按钮开机,等待电量指示灯亮起后顺时针旋转急停按钮打开急停。
▫️ 3.遥控器长按电源键开机,机器人开机后需等待约30秒与遥控器建立连接。

▫️ 4.遥控器执行校准:左侧挡位拨到最左边,右侧挡位拨到最右边,按下 🅓 键 ,等待机器人执行校准。
▫️ 5.校准过程中观察机器人各关节状态,如果出现异常转动及时拍下急停避免卡住。
▫️ 6.校准成功后机器人全身关节使能。

▫️ 7.遥控器执行站立前缩腿:左侧挡位拨到最左边,右侧挡位拨到最右边,按下 🅒 键,等待机器人缩腿。
▫️ 8.吊机下放至机器人双脚离地10cm左右,一只手在机器人后扶住,机器人站立过程中向前推住,按下 🅒 键,机器人站立。
▫️ 9.吊机上升至挂钩与肩膀水平,避免机器人摔倒时下坠距离太大。
2. 机器人H12遥控器控制教程
▫️ 1.遥控器左侧挡位拨到中间,右侧挡位拨到中间。
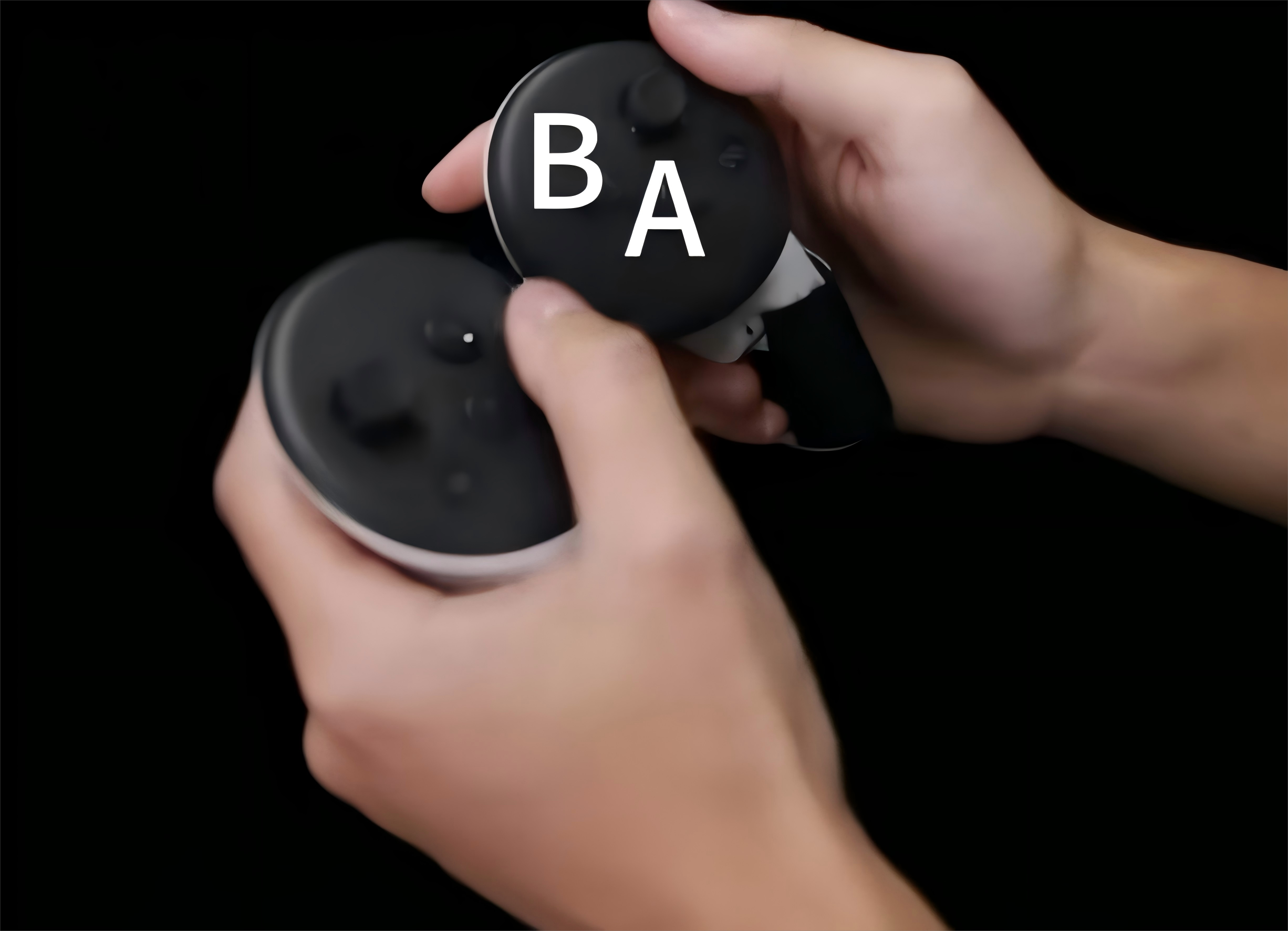
▫️ 2.按 🅐 键机器人原地踏步,按 🅓 键机器人停止踏步。
▫️ 3.左遥杠前后左右对应机器人移动的前后左右(不建议使用左右移动,容易摔)。
▫️ 4.右摇杆左右移动对应机器人左右旋转,上下对应机器人上下蹲(不建议使用蹲,且注意上下不能太高或太低且下蹲不要被安全绳拽到)。
▫️ 5.长按 🅐 键进入到VR控制模式,长按 🅑 键回到遥控器控制模式。
▫️ 6.关闭机器人程序:吊机上拉至绳子绷直且机器人脚未离地状态,遥控器长按 🅒 + 🅓 ,按下急停开关,电机驱动器断电,然后按下电源键,指示灯熄灭。

3. 机器人连接VR教程
▫️ 1.H12遥控器长按 🅐 键使机器人切换VR控制,左右手分别拿住两个手柄,选择左下角快速设置,点击进入选择WIFI并连接,确保机器人与VR连接在同一网络下。
▫️ 2.回到VR端桌面,右下角选择 Kuavo-Hand-Track-MR 软件点击进入。
▫️ 3.软件启动后点击"继续"选项VR自动连接到局域网内的机器人,此时通过头盔的透视视角能够看到机器人。
▫️ 4.退出VR: 点击手柄菜单键,点击"退出"选项退出VR软件。

4. 机器人VR控制教程
▫️ 1.左右手分别拿住两个手柄,手臂竖直垂下避免机器人启动后突然抬手,软件启动后,按住 ❎ 键后再按下 🅐 键解锁手臂(如未解锁同时按住左右手柄上板机),此时机器人手臂可跟随人手臂运动,再次按下 ❎ + 🅐 手臂回到原位。
▫️ 2.按下右手柄 🅑 键:原地踏步。
▫️ 3.左手摇杆控制机器人移动的前后,右手摇杆左右控制机器人移动的左右旋转。
▫️ 4.按下右手柄 🅐 键:回到站立状态。
▫️ 5.左右手柄上扳机分别控制左右手指开合,左手 🅨 键用于锁定或解锁手指控制。
▫️ 6.手指放到 ❎、🅐 键上(不按下)会分别触发左右灵巧手的大拇指向内侧运动。

▫️ 7.同时按下左右手柄下扳机,手臂在当前位置锁住。
▫️ 8.同时按下左右手柄上扳机,机器人手臂恢复跟随。
▫️ 9.左手 ❎ + 🅨 同时按,机器人会立刻断电(跟遥控器 🅒 + 🅓 一样,需要断电建议长按遥控器上的 🅑 键回到遥控器后断电)。

5. 电池更换及充电教程
▫️ 1.机器人共有两块电池,正常使用需要同时插入两块电池。
▫️ 2.机器人站立状态可以逐个更换电池,无需解锁机器人。
▫️ 3.取出电池:顺时针旋转电池拉环,向外抽出电池。
▫️ 4.使用充电器给电池充电。
▫️ 5.插入电池:将充好电的电池插入电池槽,拇指按压电池,使电池拉环水平。

6. 注意事项
▫️ 1. ❎ + 🅐 解锁手臂前双手自然下垂防止机器人解锁后突然抬手。
▫️ 2.走路不稳的机器人先按 🅑 键开启原地踏步后再走。
▫️ 3.拿取物品或者放下物品先停止踏步在放。
▫️ 4.坐着操作时可以把椅子挑最高,因为VR会识别与地面的距离,要注意手不能放在椅子下面,防止VR摄像头识别不到导致手乱甩。
▫️ 5.站着操作时手臂不要放在身后也不要太贴紧身体,防止机器人手臂向内收缩自损。
▫️ 6.无论什么时候,确保手柄在VR摄像头下能被识别到。
▫️ 7.当机器人卡住时,手固定在原位不要乱动,防止机器人突然连接动作幅度太大,如果2分钟后还未连接成功,扶住机器人抬起的手臂防止砸桌子,吊机绳子拉升至伸直,然后拍急停。